En los siguientes post se desarrollaran capitulo a capitulo un curso de electronica digital basica, si bien en la web hay una infinidad de cursos y temas que hablan sobre electronica digital, hay muy pocos a casi ninguno que muestran ejemplos basicos tanto teoricos como practicos, este curso pretende ser diferente ya que se desarrollara teoria y practica con resultados reales y se mostrara como armar los circuitos correspondientes.
En los cursos de electronica digital siempre se opta por comenzar a explicar que son los numeros binarios, octales y hexadecimales, en este curso se omitira esa introduccion para realizar cosas mas practicas pero no se olvidaran de esos conceptos ya que se mostraran en el momento adecuado.
Entre los temas que veremos son:


OR

En los cursos de electronica digital siempre se opta por comenzar a explicar que son los numeros binarios, octales y hexadecimales, en este curso se omitira esa introduccion para realizar cosas mas practicas pero no se olvidaran de esos conceptos ya que se mostraran en el momento adecuado.
Entre los temas que veremos son:
- Compuertas logicas y sus funciones.
- Funciones logicas combinacionales.
- Max terminos.
- Min terminos.
- Simplifacion con Mapas de Karnaugh.
- Circuitos Logicos combinacionales.
- Codificadores y Decodificadores.
- Multiplexores Y Demultiplexores.
- Circuitos Secuenciales
- Flip-Flops.
- Contadores asincronos y sincronos.
- Aplicacion de contadores.
- Maquinas de estados.
- Maquina de Mealy.
EMPEZAMOS
La electronica digital se basa en el procesamiento de numeros binarios "ceros" y "unos" que se representan con la ausencia o presencia ya sea de voltaje o corriente electrica. Los cimientos de toda la electronica digital se basan en las importantisimas compuertas logicas. Las compuertas logicas no son mas que dispositivos electronicos que realizan una funcion especifica y que dependiendo de lo que tengan en sus entradas van a tener en sus salidas.
Las compuertas logicas basicas son:
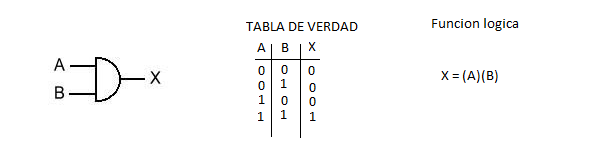
AND

Figura compuerta and
Como se aprecia en la anterior figura la primera imagen corresponde al simbolo de la compuerta and que tiene dos entradas (A y B) y una salida X, la segunda imagen nos muestra la tabla de verdad de la compuerta and, esta tabla nos indica las posibles combinaciones que se tienen en la entrada (conectar la compuerta a tierra "0" o a 5 volts "1") para tener una salida especifica (tener un "0" cero volts o un "1" 5 volts a la salida). La tercera imagen nos muestra la funcion logica, esta funcion es matematica es decir si se sustituye el valor de A o de B que corresponde a las entradas y al hacer la operacion correspondiente (operacion logica) se tendra un valor que corresponda al resultado de la operacion.
Ejemplo 1

En este ejemplo la funcion logica es una multiplicacion por eso cuando se tiene 1 en A y 0 en B al hacer la multiplicacion nos da cero (1 por 0 es 0).
Ejemplo 2

En este ejemplo se mostro un caso ya practico donde se conecta a la compuerta logica a 5 volts en ambas entradas que representan un "1" logico y al hacer la operacion correspondiente (multiplicacion logica) se tiene un "1" en la salida es decir 5 volts.

NOT

A continuacion se muestra una imagen del material a utilizar.

En la imagen anterior se aprecia la protoboar, el mini dip de 2 entradas (color azul), las compuertas logicas (3 circuitos integrados), el led en este caso color rojo, las tres resistencias, algunos cables para "alambrar" el circuito y la fuente de voltaje ( se uso una fuente de 5 volts de un PSP).
Con el material anterior vamos a empezar a armar nuestro circuito para comprobar la teoria anterior. En la siguiente imagen se puede obsevar el circuito ya armado, pero no se preocupen vamos a explicar paso a paso cada parte de como se debe de armar.

Primero se debe de "alambrar " cada lado de la protoboard de extremo a extremo para que ambas partes tenga el voltaje correspondiente, se observa que el cable color rojo va a las parte positiva del protoboar (linea roja) y el cable negro en la parte negativa del protoboar donde esta la (linea negra).

En la imagen siguiente se muestra como polarizar el circuito, el conector (caiman) de la fuente de color rojo (que en la fuente utilizada son los 5 volts) va en la linea roja y el conector (caiman) de la fuente color negro (tierra) va a la linea azul del protoboard.

La siguiente imagen muestra como se debe conectar el mini dip (color azul), de un lado se conecta dos cables (color rojo) a la parte positiva (5 volts) y del otro lado se conectan las resistencias al mini dip y a tierra (0 volts). Entre el mini dip y las resistencias van conectados otros dos cables (color verde y morado) estos van a ir conectados del otro lado al circuito integrado en este caso compuerta and. En el circuito integrado se observa un circulito (muesca) apartir de ahi se cuenta el numero de pines de izquierda a derecha por tanto siguiendo el orden numerico el cable verde esta conectado al pin numero 1 y el cable morado al pin numero 2.

En la siguiente imagen se muestra que en el pin numero 3 va conectada una resistencia y del otro lado una patita del led.

En la siguiente imagen se observa que el otro lado del led va conectado a tierra (lado azul del protoboard), hay que tener especial cuidado al conectar el led porque este debe estar correctamente polarizado, si observa bien su led que tenga a la mano observara que tiene una patita mas larga que la otra, la patita mas corta siempre sera la que se conecte a tierra y la patita mas larga sera conectada a positivo (5 volts).

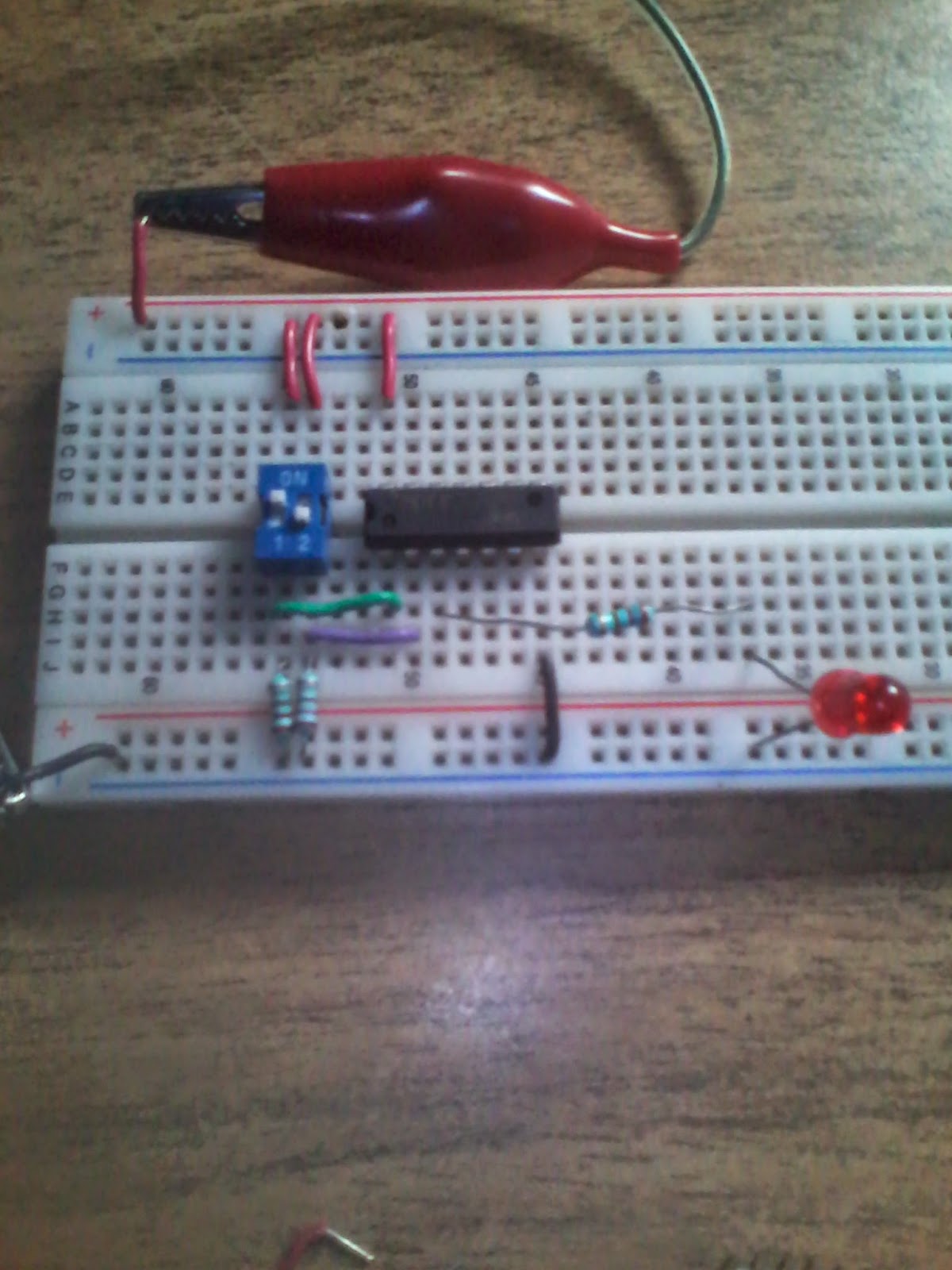
La siguiente imagen muestra practicamente como funciona la compuerta and. Se puede apreciar que en el mi dip los dos interruptores se encuentran en la posicion de abajo osea estan ambos conectados a tierra o a cero volts, que es lo mismo tener en sus entradas ceros logicos si se recuerda la funcion logica es una multiplicacion por lo que A= 0 Y B= 0 al hacer la multiplicacion nos da cero en la salida (X=0) por lo que el led no se enciende.

La siguiente imagen muestra a los interruptores del minidip en diferente posiciones en este caso A=1 y B=0 al aplicar la funcion logica X= ( 1 )( 0 ) el resultado seria X=0 por lo que el led sigue sin encender si se fuera el caso opuesto A=0 y B= 1 el resultado seria lo mismo.
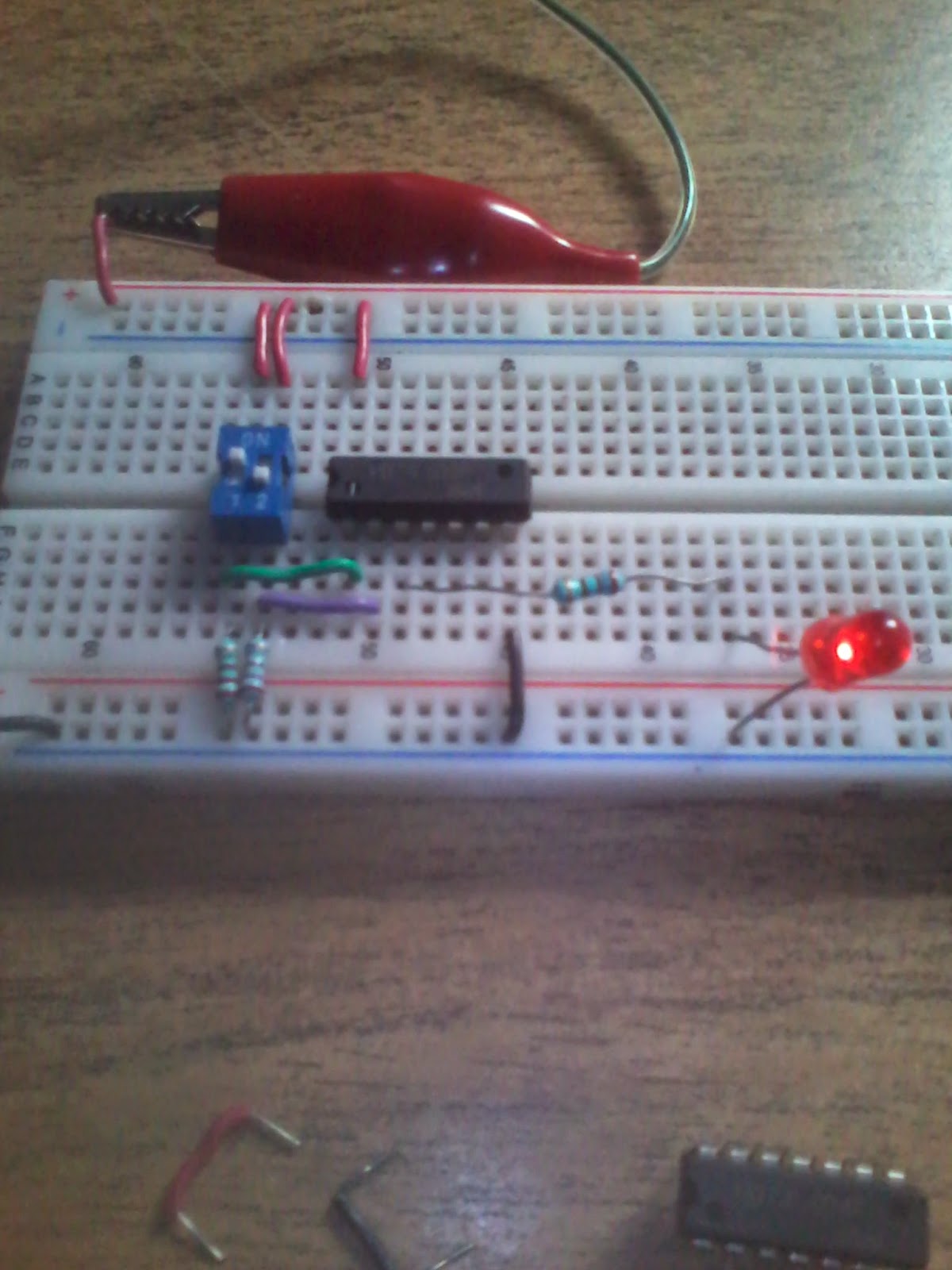
En la siguiente imagen ambos interruptores del minidip se encuentran en la posicion de arriba osea conectados a 5 volts, al aplicar la funcion logica de acuerdo a las entradas A=1 y B=1 tenemos X= ( 1 ) ( 1 ) el resultado es X=1 por lo que en la salida tenemos 5 volts y el led enciende.


La siguiente imagen muestra el minidip con un interruptor en la posicion de arriba y el otro en la posicion de abajo por lo que en las entradas se tiene A=1 y B=0 sustituyendo esos valores en la funcion logica se tiene X= 1 + 0 y el resultado X=1 por lo que en la salida se tendria 5 volts y el led enciende.
En la siguiente imagen la explicacion anterior tambien se aplica aqui A= 0 y B= 1 sustituyendo X = 0 + 1 el resultado X = 1 y el led enciende.



La siguiente imagen muestra al minidip en la posicion de arriba por lo que en la entrada se tiene 5 volts osea un 1 logico al sustituir en la funcion logica se tiene X = 1' el resultado es X = 0 por lo que el led no enciende.



Hasta aqui se concluye el primer capitulo de este curso de electronica digital.

Tanto las compuertas OR como la NOT la logica de su funcionamiento es igual que la de la compuerta AND. Solo es cuestion de ver la tabla de verdad para saber su funcionamiento, en la compuerta OR se ve en la imagen que si no hay un 1 (5 volts) en cualquier entrada o en ambas su salida es un 0 (cero volts) y su funcion matematica es una suma logica (mucho cuidado aqui no es lo mismo que una suma binaria) por lo que un 1 mas otro 1 en una suma logica sigue siendo 1. En la compuerta NOT se aprecia que la entrada se invierte es decir si en la entrada le ponemos un 1 logico (5 volts) en la salida tendremos un cero logico (0 volts) en su funcion logica se muestra una linea arriba que representa el simbolo de la negacion.
Las demas compuertas logicas se basan en las anteriores por lo que antes de pasar a las siguientes compuertas logicas vamos a dar un ejemplo practico de como utilizarlas.
Por lo que necesitaremos el siguiente material :
1 Protoboard
1 fuente de voltaje de 5 volts (puede ser un cargado de celular en desuso)
3 resistencias de 220 Ohms
1 mini dip (minimo de 2 entradas)
1 led (cualquier color)
1 circuito integrado 74ls04 (NOT)
1 circuito integrado 74ls08 (AND)
1 circuito integrado 74ls32 (OR)
Cables para protoboarA continuacion se muestra una imagen del material a utilizar.

En la imagen anterior se aprecia la protoboar, el mini dip de 2 entradas (color azul), las compuertas logicas (3 circuitos integrados), el led en este caso color rojo, las tres resistencias, algunos cables para "alambrar" el circuito y la fuente de voltaje ( se uso una fuente de 5 volts de un PSP).
Con el material anterior vamos a empezar a armar nuestro circuito para comprobar la teoria anterior. En la siguiente imagen se puede obsevar el circuito ya armado, pero no se preocupen vamos a explicar paso a paso cada parte de como se debe de armar.

Primero se debe de "alambrar " cada lado de la protoboard de extremo a extremo para que ambas partes tenga el voltaje correspondiente, se observa que el cable color rojo va a las parte positiva del protoboar (linea roja) y el cable negro en la parte negativa del protoboar donde esta la (linea negra).

En la imagen siguiente se muestra como polarizar el circuito, el conector (caiman) de la fuente de color rojo (que en la fuente utilizada son los 5 volts) va en la linea roja y el conector (caiman) de la fuente color negro (tierra) va a la linea azul del protoboard.

La siguiente imagen muestra como se debe conectar el mini dip (color azul), de un lado se conecta dos cables (color rojo) a la parte positiva (5 volts) y del otro lado se conectan las resistencias al mini dip y a tierra (0 volts). Entre el mini dip y las resistencias van conectados otros dos cables (color verde y morado) estos van a ir conectados del otro lado al circuito integrado en este caso compuerta and. En el circuito integrado se observa un circulito (muesca) apartir de ahi se cuenta el numero de pines de izquierda a derecha por tanto siguiendo el orden numerico el cable verde esta conectado al pin numero 1 y el cable morado al pin numero 2.

En la siguiente imagen se muestra que en el pin numero 3 va conectada una resistencia y del otro lado una patita del led.

En la siguiente imagen se observa que el otro lado del led va conectado a tierra (lado azul del protoboard), hay que tener especial cuidado al conectar el led porque este debe estar correctamente polarizado, si observa bien su led que tenga a la mano observara que tiene una patita mas larga que la otra, la patita mas corta siempre sera la que se conecte a tierra y la patita mas larga sera conectada a positivo (5 volts).

Comprobando funcionamiento compuerta AND
La siguiente imagen muestra practicamente como funciona la compuerta and. Se puede apreciar que en el mi dip los dos interruptores se encuentran en la posicion de abajo osea estan ambos conectados a tierra o a cero volts, que es lo mismo tener en sus entradas ceros logicos si se recuerda la funcion logica es una multiplicacion por lo que A= 0 Y B= 0 al hacer la multiplicacion nos da cero en la salida (X=0) por lo que el led no se enciende.

La siguiente imagen muestra a los interruptores del minidip en diferente posiciones en este caso A=1 y B=0 al aplicar la funcion logica X= ( 1 )( 0 ) el resultado seria X=0 por lo que el led sigue sin encender si se fuera el caso opuesto A=0 y B= 1 el resultado seria lo mismo.

En la siguiente imagen ambos interruptores del minidip se encuentran en la posicion de arriba osea conectados a 5 volts, al aplicar la funcion logica de acuerdo a las entradas A=1 y B=1 tenemos X= ( 1 ) ( 1 ) el resultado es X=1 por lo que en la salida tenemos 5 volts y el led enciende.

Comprobando funcionamiento compuerta OR.
La compuerta or su funcionamiento es similar que la compuerta and, la misma circuiteria sirve. Lo unico que cambia es la funcion logica en este caso es una suma como habiamos comentado arriba solo se debe de recordar que es una suma logica no binaria. En la siguiente imagen se muestra los dos interruptores del mini dip en la posicion abajo osea conectados a tierra por lo que en la entradas de la compuerta se tienen "ceros" al sustituir los valores en la funcion logica tenemos X= 0 + 0 teniendo como resultado X= 0 por lo que el led no enciende.

La siguiente imagen muestra el minidip con un interruptor en la posicion de arriba y el otro en la posicion de abajo por lo que en las entradas se tiene A=1 y B=0 sustituyendo esos valores en la funcion logica se tiene X= 1 + 0 y el resultado X=1 por lo que en la salida se tendria 5 volts y el led enciende.

En la siguiente imagen la explicacion anterior tambien se aplica aqui A= 0 y B= 1 sustituyendo X = 0 + 1 el resultado X = 1 y el led enciende.

En la siguiente imagen se aplica lo que se anda repitiendo a qui se aplica la suma logica (no binaria) observando el mini dip se tiene ambos interruptores en la posicion de arriba por lo que estan conectados a los 5 volts ( unos) al sustituir en la funcion logica X = 1 + 1 el resultado es X = 1 por lo que el led enciende.

Comprobando funcionamiento compuerta NOT.
La compuerta not funciona de la siguiente manera. Cuando se tiene un 1 en la entrada en la salida se tiene un 0 y viceversa. En la siguiente imagen se muestra que el circuito es casi el mismo ya que tiene un pequeño cambio, si se recuerda la compuerta not solo tiene una entrada por lo que si se observa bien solo el cable verde esta conectado a la compuerta (al pin numero 1) y la resistencia que va al led va conectado al pin numero 2. Los cambios anteriores son los unicos. En la logica del funcionamiento se se tiene el interruptor en la posicion de abajo por lo que en la entrada se tiene un cero logico al sustituir en la funcion logica X = 0 ' el resultado es X = 1 por lo que el led enciende.

La siguiente imagen muestra al minidip en la posicion de arriba por lo que en la entrada se tiene 5 volts osea un 1 logico al sustituir en la funcion logica se tiene X = 1' el resultado es X = 0 por lo que el led no enciende.

Apendice del capitulo 1
Compuerta XOR
La puerta lógica OR-exclusiva, más conocida por su nombre en inglés XOR, realiza la función booleana A'B+AB'. Su símbolo es el más (+) inscrito en un círculo. En la figura pueden observarse sus símbolo, tabla de verdad y su ecuacion.

Compuerta XNOR
Es semejante a la anterior pero su salida es negada respecto a la XOR.
















{kind=link}